
Dernièrement, Agaric IG a acquis une caméra 360° (modèle grand public). Ce type de matériel permet de prendre 2 images à très grand angle (grâce 2 capteurs de plus de plus de 180° placés dos à dos) regroupées ensuite pour former une image unique permettant une exploration à 360° dans des visualiseurs adaptés. Ce type d’image est régulièrement exploité pour les visites virtuelles (non, Agaric IG ne se lance pas dans la vente immobilière !!) et permet de donner une bonne vision d’ensemble d’un lieu.
En mettant ce type de caméra sur le toit d’une voiture ou un casque de vélo, il devient dès lors possible de produire des clichés qui peuvent alimenter le projet « Panoramax » dédié à la collecte et à la diffusion d’images libres de droit pour les territoires visibles depuis la voie publique. Deux instances de dépôt sont possibles (IGN et OpenStreetMap)
Sur Panoramax, les photos à téléverser doivent être géo référencées et horodatées (position et heure de prise de vue stockées dans les métadonnées exif de l’image) . Elles peuvent être « non 360 » mais la visualisation à 360° apporte quand même un réel plus pour l’exploration des lieux.
Photo 360° d’un parcours « Agaric IG » réalisé en « Territoire Bourguignon renommé »
Pour permettre d’alimenter à sa mesure (pas de déplacement dédié = alimentation opportuniste) le site Panoramax et compte tenu des limitations du modèle utilisé par Agaric IG, il a fallu trouver une chaîne de traitement des données permettant :
- de s’affranchir de l’intervalle actuellement de 3s entre 2 photos proposé par le mode « intervalle photo »
- d’intégrer les données de localisation dans les images, la caméra ne disposant pas d’un récepteur GNSS/GPS embarqué
Le processus global retenu consiste :
- à utiliser le mode « Timelapse » de la caméra qui produit une vidéo 360° « 8k » contenant des images prises toutes les 0.5s,
- à capturer parallèlement la trace GNSS du parcours réalisé
- à fusionner les 2 sources de données pour permettre d’obtenir des photos exploitables par Panoramax
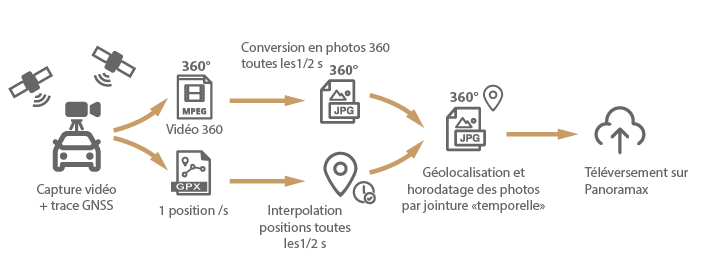
Principe de capture et traitement des images pour publication sur Panoramax
Chaque « frame » non géolocalisé de la vidéo est ainsi exporté en photo JPEG et la trace GNSS est importée dans une table PostGresql/PostGis sous forme de points caractérisé par sa position et la date et l’heure GNSS associée. Chaque position étant capturée actuellement à un intervalle d’1 s et les photos étant prises toutes les 0.5s, des positions fictives sont insérées automatiquement (on considère que la vitesse est constante entre 2 positions réelles). Une jointure « temporelle » est ensuite réalisée entre les photos et les positions GNSS en se basant sur l’affectation manuelle de la date et de l’heure de la première photo (Chaque photo suivante prise après 0.5s trouveras ainsi sa position correspondante). Les associations photos-positions sont ensuite exploitées pour renseigner les métadonnées (localisation et date et heure de la prise de vue) de chaque photo à téléverser dans Panoramax.
Malgré l’automatisation du processus qui permet de gagner du temps dans la publication sur le site Panoramax, cette méthode n’est pas parfaite pour les raisons suivantes :
- La vidéo compresse les images et le « petit capteur » de la caméra, même en 8k, ne permet pas d’obtenir des images aussi propres et définies qu’une photo notamment dans des conditions de faible luminosité (merci la météo de ce début de printemps !). A faible vitesse, l’usage d’une photo toute les 3s serait préférable
- Des interventions manuelles sont nécessaires à ce jour pour convertir le format vidéo 360 (INSV) en MP4 et associer une position de « calage » à la première photo du parcours.
Des améliorations devront également être réalisées pour permettre de limiter l’envoie de photos inutiles (attente aux feu, etc.) et exploiter l’API Panoramax pour publier les de données (l’interface Web de dépôt du site Panoramax reste néanmoins très intuitive et efficace).
Même si Agaric IG utilise son Rover RTK pour capturer la trace GNSS, la correction RTK n’est pas activée compte tenu de l’imprécision liée à l’affectation manuelle de la position à la première image de la séquence.
Plus globalement, espérons que les opérations de capture 360 réalisées à grande échelle à l’initiative des acteurs publics dans le cadre de commandes spécifiques (pcrs ou autre) permettront d’alimenter de manière significative ce projet communautaire qui représente un réel outil complémentaire à la carte pour une première appréciation du terrain.
#CentipedeRTK #GNSS #opensource #Panoramax
Web : https://panoramax.fr/
Groupe LinkedIn : https://www.linkedin.com/groups/12741355/